
สินค้า
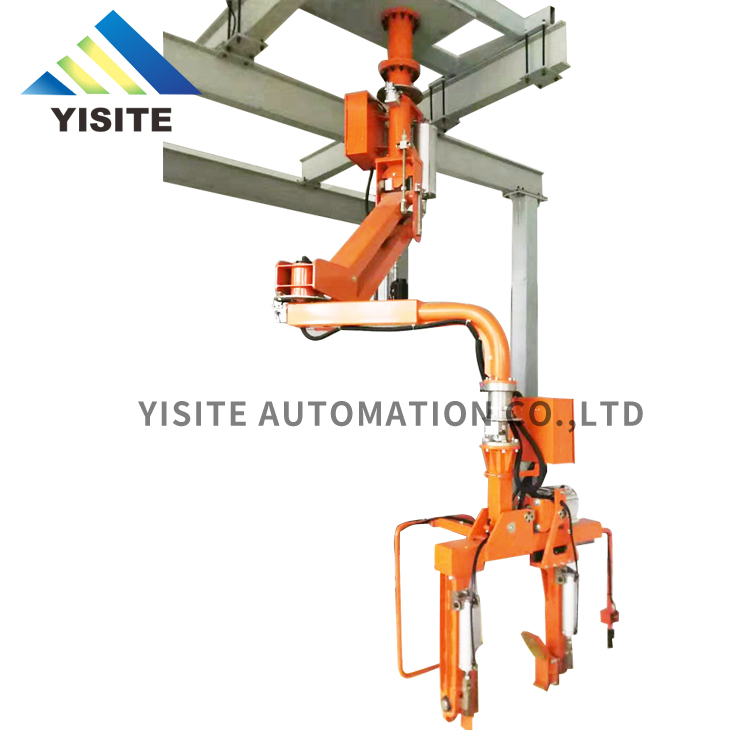


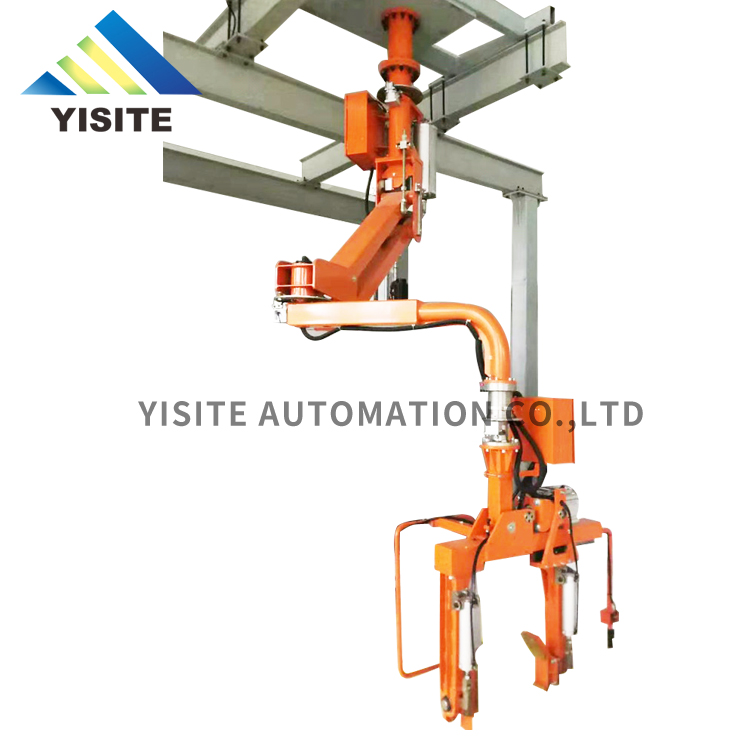
ระบบกันสะเทือน Jib Cranes Manipulator
คำอธิบายสั้น ๆ :
หุ่นยนต์เสริมระบบกันสะเทือนประกอบด้วยฐานการติดตั้ง โฮสต์และแกนแขนเหล็ก อุปกรณ์ยึด แขนหลักสามารถหมุนได้ 360 องศา แกนแขนที่สองสามารถหมุนได้ 270 องศาเพื่อให้ได้ช่วงการทำงานของการครอบคลุม และการหมุนสามารถเพิ่ม กลไกเบรก เหมาะสำหรับการจัดการความถี่สูง การวางตำแหน่ง การประกอบส่วนประกอบ และโอกาสอื่น ๆ



เกี่ยวกับเรา

เราเป็นผู้ผลิตอุปกรณ์ระบบอัตโนมัติที่ปรับแต่งอย่างมืออาชีพ ผลิตภัณฑ์ของเราประกอบด้วยเครื่องถอนพาเลท เครื่องหยิบและวางเครื่องบรรจุ เครื่องจัดเรียงพาเลท แอปพลิเคชันบูรณาการหุ่นยนต์ เครื่องควบคุมการขนถ่าย การขึ้นรูปกล่อง การปิดผนึกกล่อง เครื่องจ่ายพาเลท เครื่องห่อ และโซลูชั่นอัตโนมัติอื่น ๆ สำหรับสายการผลิตบรรจุภัณฑ์ส่วนหลัง
พื้นที่โรงงานของเราประมาณ 3,500 ตารางเมตร ทีมงานด้านเทคนิคหลักมีประสบการณ์โดยเฉลี่ย 5-10 ปีในด้านระบบอัตโนมัติทางกล รวมถึงวิศวกรออกแบบเครื่องกล 2 คน วิศวกรเขียนโปรแกรม 1 คน พนักงานประกอบ 8 คน เจ้าหน้าที่แก้ไขจุดบกพร่องหลังการขาย 4 คน และพนักงานอีก 10 คน
หลักการของเราคือ "ลูกค้าต้องมาก่อน คุณภาพต้องมาก่อน ชื่อเสียงมาก่อน" เรามักจะช่วยเหลือลูกค้าของเรา "เพิ่มกำลังการผลิต ลดต้นทุน และปรับปรุงคุณภาพ" เรามุ่งมั่นที่จะเป็นซัพพลายเออร์ชั้นนำในอุตสาหกรรมเครื่องจักรอัตโนมัติ
ลักษณะผลิตภัณฑ์
โดยการตรวจจับถ้วยดูดหรือส่วนปลายของหุ่นยนต์และปรับสมดุลแรงดันแก๊สในกระบอกสูบ จะสามารถระบุโหลดบนแขนกลได้โดยอัตโนมัติ และปรับความดันอากาศในกระบอกสูบโดยอัตโนมัติผ่านวงจรควบคุมลอจิกแบบนิวแมติก เพื่อให้บรรลุ วัตถุประสงค์ของความสมดุลอัตโนมัติ เมื่อมันทำงาน ของหนักก็เหมือนกับการลอยอยู่ในอากาศ ซึ่งสามารถหลีกเลี่ยงการชนกันของการเทียบท่าผลิตภัณฑ์ ภายในช่วงการทำงานของแขนกล ผู้ปฏิบัติงานสามารถเลื่อนไปทางซ้ายและล่างได้อย่างง่ายดาย ตำแหน่งและตัวบุคคลสามารถใช้งานได้ง่าย ในเวลาเดียวกัน วงจรนิวแมติกยังมีฟังก์ชันป้องกันโซ่ เช่น ป้องกันการสูญเสียวัตถุโดยไม่ได้ตั้งใจและการป้องกันการสูญเสียแรงดัน

หลักการทำงานและโหมดของตัวจัดการกำลังช่วงล่าง:
โดยการตรวจจับถ้วยดูดหรือส่วนปลายของหุ่นยนต์และปรับสมดุลแรงดันแก๊สในกระบอกสูบ จะสามารถระบุโหลดบนแขนกลได้โดยอัตโนมัติ และปรับความดันอากาศในกระบอกสูบโดยอัตโนมัติผ่านวงจรควบคุมลอจิกแบบนิวแมติก เพื่อให้บรรลุ วัตถุประสงค์ของความสมดุลอัตโนมัติ เมื่อทำงาน วัตถุหนักก็เหมือนกับการลอยอยู่ในอากาศ ซึ่งสามารถหลีกเลี่ยงการชนกันของการเทียบท่าผลิตภัณฑ์ ภายในช่วงการทำงานของแขนกล ผู้ปฏิบัติงานสามารถเลื่อนไปทางซ้ายและลงไปยังตำแหน่งใด ๆ ได้อย่างง่ายดาย และตัวบุคคลเองก็สามารถใช้งานได้อย่างง่ายดาย ขณะเดียวกัน วงจรนิวแมติกยังมีฟังก์ชันการป้องกันโซ่ เช่น การป้องกันการสูญเสียวัตถุโดยไม่ได้ตั้งใจและการป้องกันการสูญเสียแรงดัน
คุณสมบัติ
น้ำหนักบรรทุกสูงสุด- 900 กก
รัศมีการกระทำสูงสุด: 4500 มม
การเดินทางในแนวตั้ง: 0.5 ม./นาที
ระบบควบคุม: 2200 มม
ระบบควบคุม: อากาศเป็นแบบนิวแมติกส์
จัดหา: อากาศอัด (40 µm) ไม่มีจาระบี
ความกดดันในการทำงาน: 0.7 ÷ 0.8 เมกะพาสคัล
อุณหภูมิในการทำงาน: +0° ถึง +45° C
เสียงรบกวน:ปริมาณการใช้อากาศ: 100 Nl 400 N ต่อรอบ
การหมุน: เพลาคอลัมน์และเพลาฟิกซ์เจอร์หมุนต่อเนื่อง 360°, เพลากลางหมุนต่อเนื่อง 300°







