
สินค้า



ถ้วยดูดแก้วการจัดการหุ่นยนต์ลม
คำอธิบายสั้น ๆ :
หุ่นยนต์แบบนิวแมติกหรือที่เรียกว่าหุ่นยนต์แบบสมดุลเครนเครื่องเพิ่มความสมดุลเครื่องถ่ายโอนโหลดแบบแมนนวล (ข้อความข้างต้นไม่ใช่มืออาชีพ แต่เป็นที่นิยมในประเทศจีน) เป็นนวนิยายที่ใช้สำหรับการขนถ่ายและติดตั้งวัสดุและการดำเนินการประหยัดแรงงานของอุปกรณ์ไฟฟ้า

ถ้วยดูดแก้วการจัดการเครื่องมือจัดการลมใช้หลักการสมดุลของแรงเพื่อให้ผู้ปฏิบัติงานสามารถดันและดึงวัตถุหนักตามลำดับซึ่งสามารถปรับสมดุลตำแหน่งการเคลื่อนย้ายในอวกาศวัตถุหนักจะก่อตัวเป็นสถานะลอยตัวเมื่อยกหรือลดลงและไม่- แรงปฏิบัติการรับประกันโดยถนนแก๊ส (กระบวนการแปรรูปและการควบคุมต้นทุนการออกแบบ แรงปฏิบัติการน้อยกว่า 3 กก. เป็นมาตรฐานการตัดสิน) แรงปฏิบัติการได้รับผลกระทบจากน้ำหนักชิ้นงานของชิ้นงาน หากไม่มีการปฏิบัติงานที่ชำนาญ ผู้ปฏิบัติงานสามารถผลักและดึงวัตถุที่มีน้ำหนักมากได้ด้วยมือและวางตุ้มน้ำหนักอย่างเหมาะสมในตำแหน่งใดก็ได้ในพื้นที่

เกี่ยวกับเรา

เราเป็นผู้ผลิตอุปกรณ์ระบบอัตโนมัติที่ปรับแต่งอย่างมืออาชีพ ผลิตภัณฑ์ของเราประกอบด้วยเครื่องถอนพาเลท เครื่องหยิบและวางเครื่องบรรจุ เครื่องจัดเรียงพาเลท แอปพลิเคชันบูรณาการหุ่นยนต์ เครื่องควบคุมการขนถ่าย การขึ้นรูปกล่อง การปิดผนึกกล่อง เครื่องจ่ายพาเลท เครื่องห่อ และโซลูชั่นอัตโนมัติอื่น ๆ สำหรับสายการผลิตบรรจุภัณฑ์ส่วนหลัง
พื้นที่โรงงานของเราประมาณ 3,500 ตารางเมตร ทีมงานด้านเทคนิคหลักมีประสบการณ์โดยเฉลี่ย 5-10 ปีในด้านระบบอัตโนมัติทางกล รวมถึงวิศวกรออกแบบเครื่องกล 2 คน วิศวกรเขียนโปรแกรม 1 คน พนักงานประกอบ 8 คน เจ้าหน้าที่แก้ไขจุดบกพร่องหลังการขาย 4 คน และพนักงานอีก 10 คน
หลักการของเราคือ "ลูกค้าต้องมาก่อน คุณภาพต้องมาก่อน ชื่อเสียงมาก่อน" เรามักจะช่วยเหลือลูกค้าของเรา "เพิ่มกำลังการผลิต ลดต้นทุน และปรับปรุงคุณภาพ" เรามุ่งมั่นที่จะเป็นซัพพลายเออร์ชั้นนำในอุตสาหกรรมเครื่องจักรอัตโนมัติ
- 1. โครงสร้าง: เครื่องมือจัดการกำลังแบบนิวแมติกส่วนใหญ่ประกอบด้วยโฮสต์และฟิกซ์เจอร์จัดเก็บข้อมูลการติดตั้ง2. ฐานรากการติดตั้ง แบ่งเป็น 1. เสายึดตายตัว 2. ฐานยึดเคลื่อนที่ 3. ฐานแขวนยึดเพดาน 4. ฐานยึดเพดานเป็นแบบเคลื่อนที่ได้
3. อุปกรณ์ติดตั้ง: ปรับแต่งโดยทั่วไปตามขนาดลักษณะของชิ้นส่วนที่ลูกค้าให้ไว้1. ประเภทตะขอ; 2. ประเภทจับ; 3. ประเภทกระชับ; 4. ประเภทที่เพิ่มขึ้นภายใน; 5. ประเภทลิฟท์; 6. ประเภทด้ามจับ; 7. การเปลี่ยนแปลงการหมุนด้ามจับ (พลิก 90° หรือ 180°) 0; 8. การดูดซับสูญญากาศ; 9. การเปลี่ยนแปลงการหมุนการดูดซับสูญญากาศ (พลิก 90 °หรือ 180 °) และอื่น ๆ ที่ได้รับการคัดเลือกและพัฒนาและออกแบบมาโดยเฉพาะได้รับผลการใช้งานที่ดี
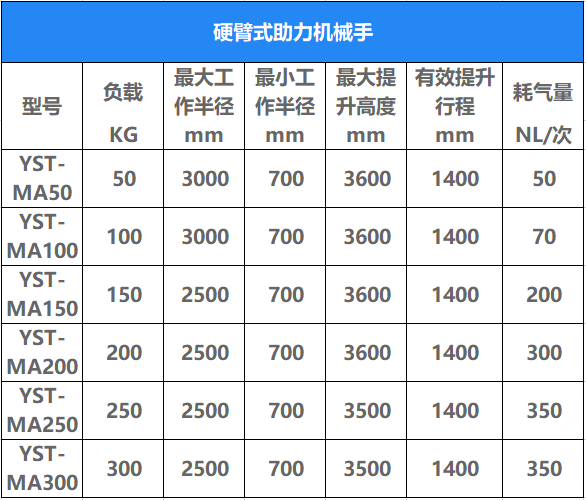
4. โฮสต์: ส่วนใหญ่ประกอบด้วยกระบอกสูบที่สมดุลและคานเท้าแขนปิดหลายจุดที่เข้มงวด และพารามิเตอร์หลักคือความสามารถในการยกและรัศมีการบริการ
รายละเอียดสินค้า
การจัดการกระจกแบบถ้วยดูด อุปกรณ์ควบคุมแบบนิวแมติกได้รับการออกแบบมาให้ใช้งานกับสิ่งของที่แขวนอยู่ ด้วยเหตุนี้จึงมีความจำเป็นอย่างยิ่งในการขนถ่ายเครื่องจักรอุตสาหกรรม ด้วยอุปกรณ์เสริมเกี่ยวกับลมและอุปกรณ์เสริมพิเศษ ไม่เพียงแต่สามารถยกชิ้นส่วนได้เท่านั้น แต่ยังหมุน เอียงมดเพื่อพลิกกลับด้าน หรือเพียงแค่เอียงชิ้นส่วนก็ได้
คุณสมบัติผลิตภัณฑ์
1. ตัวจัดการกำลังแบบนิวแมติกเต็มรูปแบบส่วนใหญ่ประกอบด้วยโฮสต์การจัดเก็บการติดตั้งและฟิกซ์เจอร์
2. ฐานรากการติดตั้ง แบ่งเป็น 1. เสายึดตายตัว 2. ฐานยึดเคลื่อนที่ 3. ฐานแขวนยึดเพดาน 4. ฐานยึดเพดานเป็นแบบเคลื่อนที่ได้
3. อุปกรณ์ติดตั้ง: ปรับแต่งโดยทั่วไปตามขนาดลักษณะของชิ้นส่วนที่ลูกค้าให้ไว้1. ประเภทตะขอ; 2. ประเภทจับ; 3. ประเภทกระชับ; 4. ประเภทที่เพิ่มขึ้นภายใน; 5. ประเภทลิฟท์; 6. ประเภทด้ามจับ; 7. การเปลี่ยนแปลงการหมุนของด้ามจับ (พลิก 90° หรือ 180°) 0; 8. การดูดซับสูญญากาศ; 9. การเปลี่ยนแปลงการหมุนการดูดซับสูญญากาศ (พลิก 90 °หรือ 180 °) และอื่น ๆ ที่ได้รับการคัดเลือกและพัฒนาและออกแบบมาโดยเฉพาะได้รับผลการใช้งานที่ดี
4. โฮสต์: ส่วนใหญ่ประกอบด้วยกระบอกสูบที่สมดุลและคานเท้าแขนปิดหลายจุดที่เข้มงวด และพารามิเตอร์หลักคือความสามารถในการยกและรัศมีการบริการ







