
สินค้า


YST-125หุ่นยนต์ช่วยควบคุมแฮนด์
คำอธิบายสั้น ๆ :
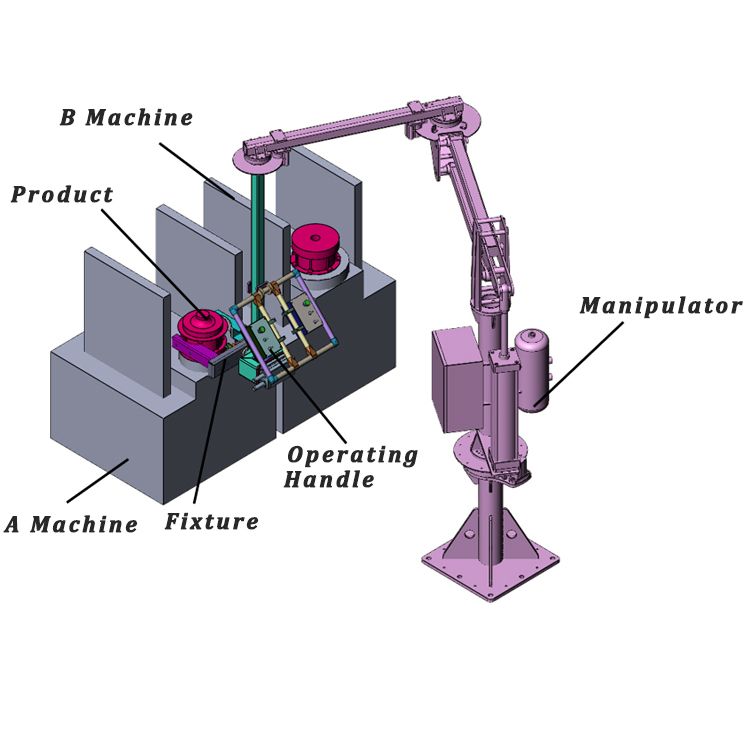
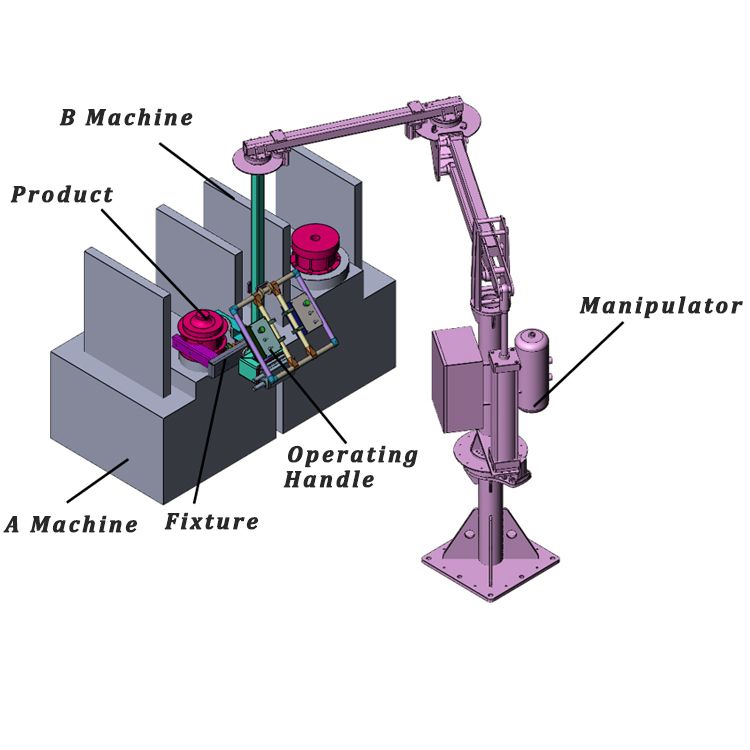
อุปกรณ์ควบคุมกำลังช่วยหรือที่เรียกว่าเครนทรงตัว เป็นอุปกรณ์ช่วยควบคุมพลังงานแบบใหม่สำหรับการขนถ่ายวัสดุและการดำเนินการประหยัดแรงงานระหว่างการติดตั้ง

ใช้หลักการสมดุลของแรงอย่างชาญฉลาด เพื่อให้ผู้ปฏิบัติงานสามารถดันและดึงน้ำหนักได้อย่างเหมาะสม จากนั้นจึงสามารถเคลื่อนที่และจัดตำแหน่งในพื้นที่ได้อย่างสมดุล หากไม่มีทักษะการวิ่งจ๊อกกิ้ง ผู้ปฏิบัติงานสามารถดันและดึงวัตถุที่มีน้ำหนักมากได้ด้วยมือ และวัตถุที่มีน้ำหนักมากก็สามารถวางในตำแหน่งใดๆ ในพื้นที่ได้อย่างถูกต้อง

เพื่อความสะดวกในการพกพาของหุ่นยนต์ช่วย วิธีแก้ปัญหาง่ายๆ คือติดตั้งเสากราวด์ของหุ่นยนต์ช่วยกับแผ่นเหล็กขนาดใหญ่เพื่อทำหน้าที่เป็นน้ำหนักถ่วงให้กับหุ่นยนต์และน้ำหนักโดยรวม จากนั้นด้วยการวางถุงส้อมไว้บนแผ่นเหล็ก จึงสามารถเคลื่อนย้ายเครื่องไปยังตำแหน่งต่างๆ ได้อย่างง่ายดายด้วยรถยก เราเรียกมันว่าเครื่องมือจัดการพลังงานแบบเคลื่อนที่
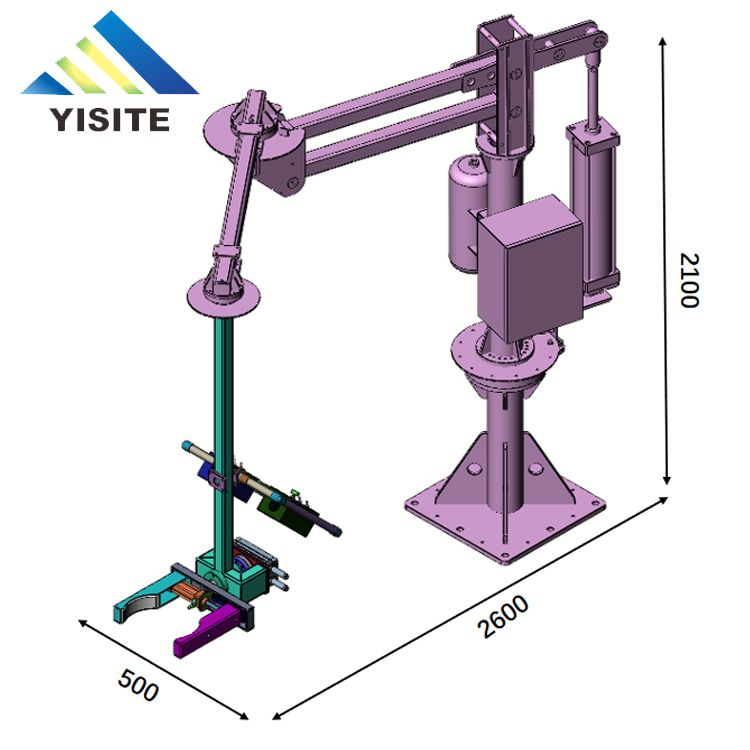
หุ่นยนต์ช่วยกำลัง ฟิกซ์เจอร์สามารถปรับแต่งได้ตามความต้องการ และเหมาะสำหรับการขนย้ายและการขนถ่ายชิ้นงานต่างๆ น้ำหนักผลิตภัณฑ์คือ 50KG รัศมีการทำงานของหุ่นยนต์คือ 2.5 เมตร และความสูงในการยกคือ 1.3 เมตร

เกี่ยวกับเรา

เราเป็นผู้ผลิตอุปกรณ์ระบบอัตโนมัติที่ปรับแต่งอย่างมืออาชีพ ผลิตภัณฑ์ของเราประกอบด้วยเครื่องถอนพาเลท เครื่องหยิบและวางเครื่องบรรจุ เครื่องจัดเรียงพาเลท แอปพลิเคชันบูรณาการหุ่นยนต์ เครื่องควบคุมการขนถ่าย การขึ้นรูปกล่อง การปิดผนึกกล่อง เครื่องจ่ายพาเลท เครื่องห่อ และโซลูชั่นอัตโนมัติอื่น ๆ สำหรับสายการผลิตบรรจุภัณฑ์ส่วนหลัง
พื้นที่โรงงานของเราประมาณ 3,500 ตารางเมตร ทีมงานด้านเทคนิคหลักมีประสบการณ์โดยเฉลี่ย 5-10 ปีในด้านระบบอัตโนมัติทางกล รวมถึงวิศวกรออกแบบเครื่องกล 2 คน วิศวกรเขียนโปรแกรม 1 คน พนักงานประกอบ 8 คน เจ้าหน้าที่แก้ไขจุดบกพร่องหลังการขาย 4 คน และพนักงานอีก 10 คน
หลักการของเราคือ "ลูกค้าต้องมาก่อน คุณภาพต้องมาก่อน ชื่อเสียงมาก่อน" เรามักจะช่วยเหลือลูกค้าของเรา "เพิ่มกำลังการผลิต ลดต้นทุน และปรับปรุงคุณภาพ" เรามุ่งมั่นที่จะเป็นซัพพลายเออร์ชั้นนำในอุตสาหกรรมเครื่องจักรอัตโนมัติ
หุ่นยนต์ควบคุมสายเคเบิล
| แบบอย่าง | YST-125 | |
| โครงสร้างทางกล | ผู้ช่วยหุ่นยนต์ | |
| ลักษณะการดำเนินการ | ระบบกึ่งอัตโนมัติ | |
| น้ำหนักการวางบนพาเลท (ไม่มีฟิกซ์เจอร์) | 20กก | |
| แกนการเคลื่อนที่ | 3 แกน | |
| ช่วงการดำเนินการ | แกน Z (ขึ้นลง) | 1400มม |
| แกน 1 (หมุน) | 0-300° | |
| แกน 2 (หมุน) | 0-300° | |
| แกน 3 (หมุน) | 0-300° | |
| รัศมีการหมุนสูงสุด | 2000มม | |
| น้ำหนักตัว (ไม่รวมฟิกซ์เจอร์) | 200กก | |
รายละเอียดสินค้า
1. หุ่นยนต์ช่วยพลังงานแบบเคลื่อนที่มีฟังก์ชั่นกันสะเทือนแบบเต็มช่วงและการใช้งานทำได้ง่ายและฟรี
2. หุ่นยนต์ช่วยกำลังผลิตตามหลักการยศาสตร์และการทำงานสะดวกสบาย
3. การออกแบบโครงสร้างของหุ่นยนต์ช่วยพลังงานเคลื่อนที่เป็นแบบโมดูลาร์และมีการรวมการควบคุมวงจรอากาศไว้ด้วย
4. อุปกรณ์จัดการพลังงานแบบเคลื่อนที่ช่วยลดต้นทุนค่าแรงลง 50% ลดความเข้มของแรงงานลง 85% และเพิ่มประสิทธิภาพการผลิตลง 50%
5. อุปกรณ์จัดการพลังงานแบบเคลื่อนที่ได้รับการปรับแต่งตามปริมาณผลิตภัณฑ์และจังหวะการทำงาน โดยมีรูปแบบต่างๆ เพื่อตอบสนองความต้องการที่แตกต่างกัน









