
สินค้า

กล่องกระดาษโครงสำหรับตั้งสิ่งของอัตโนมัติ
คำอธิบายสั้น ๆ :
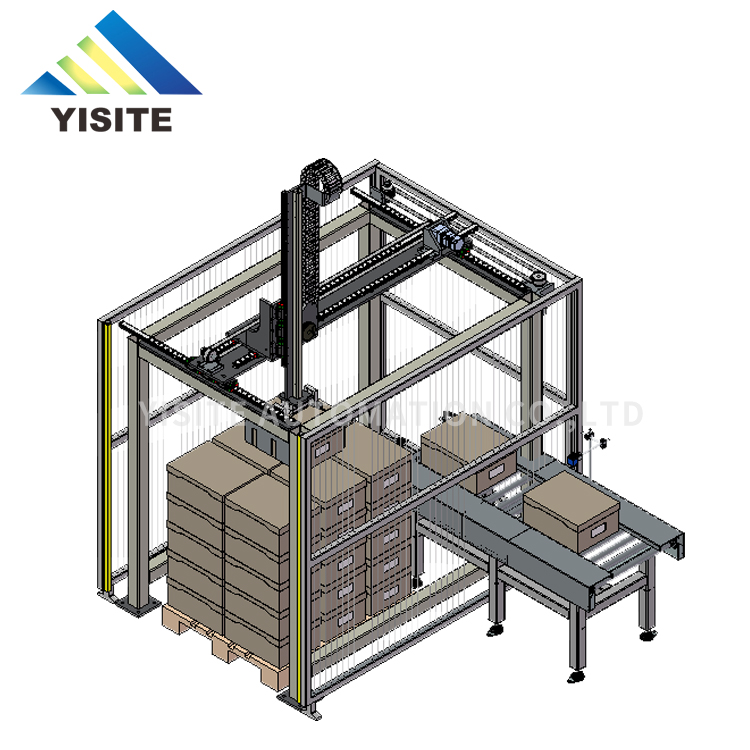
กล่องกระดาษโครงสำหรับตั้งสิ่งของอัตโนมัติการแนะนำผลิตภัณฑ์เครื่องจัดเรียงสินค้าบนพาเลท: หน่วยหลักของเครื่องจัดเรียงสินค้าประกอบด้วยรถเข็นที่สามารถเคลื่อนที่ไปข้างหน้าและข้างหลัง โครง และแพลตฟอร์มผู้ให้บริการที่สามารถยกขึ้นและลงได้ ขนาดและฟิกซ์เจอร์สามารถปรับแต่งได้
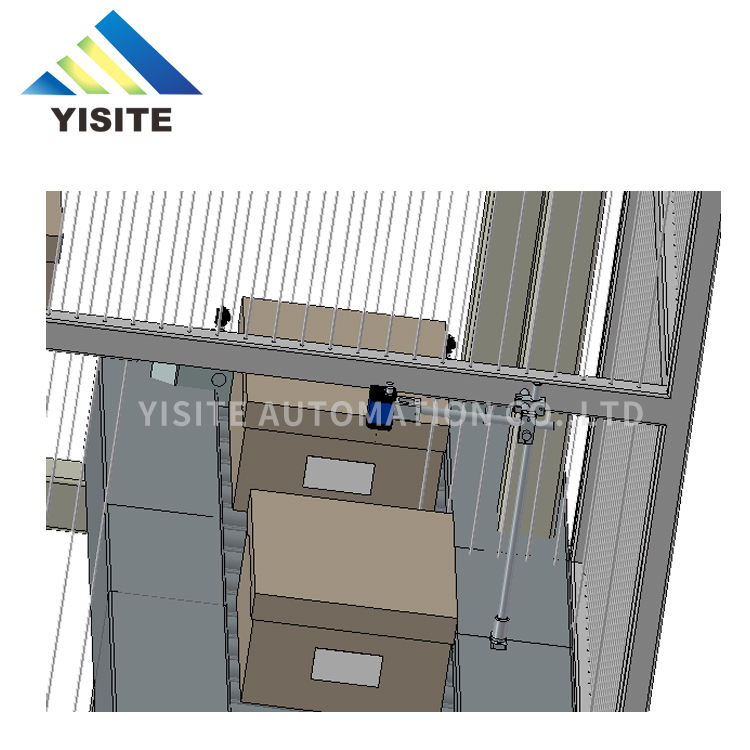
กล่องกระดาษโครงสำหรับตั้งสิ่งของอัตโนมัติวางบนพาเลทมีการออกแบบพิเศษของด้ามจับแบบนิวแมติกความดันที่ปรับได้พร้อมกับวาล์วบัฟเฟอร์แรงดันเพื่อให้การดำเนินการจับพร้อมกับกลไกการเหนี่ยวนำสามารถรับรู้วัตถุได้โดยอัตโนมัติและแจ้งศูนย์ควบคุมสำหรับการจับวัตถุ

เกี่ยวกับเรา

เราเป็นผู้ผลิตอุปกรณ์ระบบอัตโนมัติที่ปรับแต่งอย่างมืออาชีพ ผลิตภัณฑ์ของเราประกอบด้วยเครื่องถอนพาเลท เครื่องหยิบและวางเครื่องบรรจุ เครื่องจัดเรียงพาเลท แอปพลิเคชันบูรณาการหุ่นยนต์ เครื่องควบคุมการขนถ่าย การขึ้นรูปกล่อง การปิดผนึกกล่อง เครื่องจ่ายพาเลท เครื่องห่อ และโซลูชั่นอัตโนมัติอื่น ๆ สำหรับสายการผลิตบรรจุภัณฑ์ส่วนหลัง
พื้นที่โรงงานของเราประมาณ 3,500 ตารางเมตร ทีมงานด้านเทคนิคหลักมีประสบการณ์โดยเฉลี่ย 5-10 ปีในด้านระบบอัตโนมัติทางกล รวมถึงวิศวกรออกแบบเครื่องกล 2 คน วิศวกรเขียนโปรแกรม 1 คน พนักงานประกอบ 8 คน เจ้าหน้าที่แก้ไขจุดบกพร่องหลังการขาย 4 คน และพนักงานอีก 10 คน
หลักการของเราคือ "ลูกค้าต้องมาก่อน คุณภาพต้องมาก่อน ชื่อเสียงมาก่อน" เรามักจะช่วยเหลือลูกค้าของเรา "เพิ่มกำลังการผลิต ลดต้นทุน และปรับปรุงคุณภาพ" เรามุ่งมั่นที่จะเป็นซัพพลายเออร์ชั้นนำในอุตสาหกรรมเครื่องจักรอัตโนมัติ
Truss XYZ เครื่องจัดเรียงกล่องอัตโนมัติเต็มรูปแบบ
1. ส่วนประกอบของเครื่องเรียงซ้อน
เครื่องจัดเรียงพาเลทประกอบด้วยโครงการติดตั้ง ระบบกำหนดตำแหน่ง ระบบขับเคลื่อนเซอร์โว ระบบควบคุม ระบบควบคุมและจ่ายไฟฟ้า อุปกรณ์ป้องกันความปลอดภัย ฯลฯ พร้อมกับระบบกำหนดตำแหน่งฟีดอัตโนมัติ (ระบบจ่ายซ้อนอัตโนมัติเสริม)
2. ชั้นวางเครื่องซ้อน
เนื่องจากความเร็วในการเคลื่อนที่ของตัวเรียงซ้อนนั้นเร็วมาก สถานะเริ่มต้นจึงมีผลกระทบอย่างมากต่อโครงยึด โครงการติดตั้งจะต้องมีความแข็งแกร่งดีมากเพื่อให้มั่นใจว่าการทำงานของการเรียงซ้อนมีความเสถียร ดังนั้นเราจึงได้ออกแบบโครงสร้างโครงเหล็กเชื่อมเป็น กรอบรองรับ
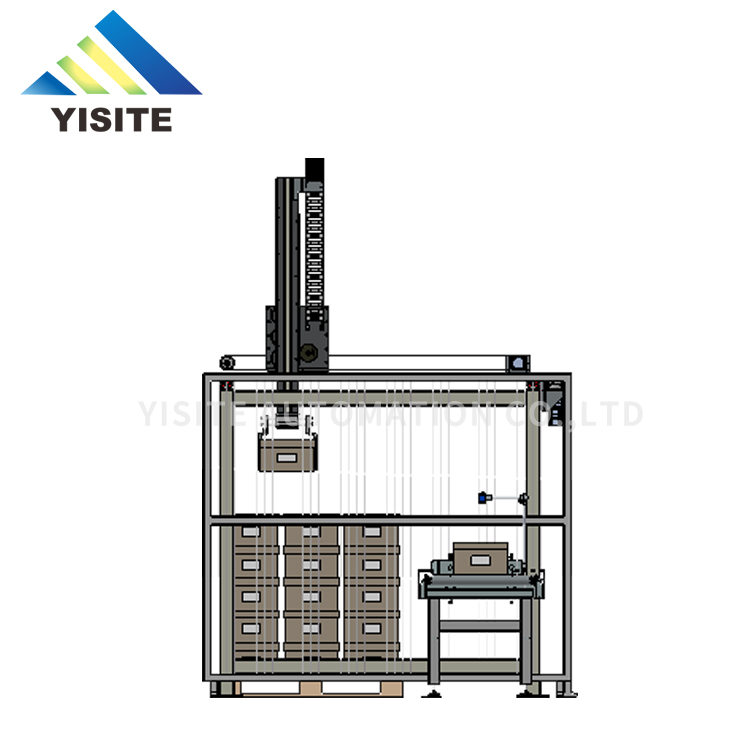
3. ระบบกำหนดตำแหน่งเครื่องวางบนพาเลท Stacker
ระบบกำหนดตำแหน่งรถยกเป็นแกนหลักของอุปกรณ์ทั้งหมด เป็นผลิตภัณฑ์ของบริษัท Yaskawa (ประเทศญี่ปุ่น) ความเร็วในการเคลื่อนที่ที่รวดเร็ว และความแม่นยำในการทำซ้ำสูง มีการเลือกพิกัด X, Y, Z สามพิกัดสำหรับการส่งผ่านสายพานฟันแบบซิงโครนัส พิกัดเดียว ความแม่นยำของตำแหน่งซ้ำคือ 0.1 มม. ความเร็วการเคลื่อนที่ของเส้นเร็ว: 1,000 มม./วินาที แกน X เป็นระบบกำหนดตำแหน่งเดี่ยวที่มีความยาวเดี่ยว 3,000 มม. และช่วง 1,935 มม. เครื่องส่งสัญญาณแบบซิงโครนัสช่วยให้มั่นใจถึงการเคลื่อนที่แบบซิงโครนัสของระบบกำหนดตำแหน่งทั้งสองและขับเคลื่อนด้วยเซอร์โวมอเตอร์ 1500W เพื่อให้ตรงกับแรงบิดในการขับขี่และความเฉื่อยจึงมีตัวลดเกียร์ดาวเคราะห์ที่มีความแม่นยำสูง
แกน Y ใช้ระบบกำหนดตำแหน่งคู่ เหตุผลที่หน่วยกำหนดตำแหน่งที่มีหน้าตัดขนาดใหญ่ดังกล่าวส่วนใหญ่เป็นเพราะแกน Y เป็นตัวรองรับปลายคู่ที่มีโครงสร้างช่วงล่างตรงกลาง หากหน้าตัดที่เลือกไม่เพียงพอ จะไม่รับประกันความเสถียรของการเคลื่อนไหวของหุ่นยนต์ และหุ่นยนต์จะสั่นเมื่อเคลื่อนที่ด้วยความเร็วสูง หน่วยกำหนดตำแหน่งสองหน่วยถูกใช้เคียงข้างกันเพื่อคลิปแกน Z ที่อยู่ตรงกลางและทรงตัว โหลดได้ดี โหมดการติดตั้งนี้มีเสถียรภาพที่ดีมาก ระบบกำหนดตำแหน่งทั้งสองระบบขับเคลื่อนด้วยเซอร์โวมอเตอร์ 1500W พร้อมด้วยชุดลดเกียร์ดาวเคราะห์ที่มีความแม่นยำสูงเพื่อให้ตรงกับแรงบิดและความเฉื่อยของไดรฟ์
ระบบกำหนดตำแหน่งแกน Z นั้นมั่นคงและมั่นคง โดยทั่วไปผลิตภัณฑ์จะมีตัวเลื่อนคงที่และการเคลื่อนไหวขึ้นและลงโดยรวม เซอร์โวมอเตอร์จำเป็นต้องปรับปรุงวัตถุอย่างรวดเร็ว ซึ่งจำเป็นต้องเอาชนะแรงโน้มถ่วงและแรงเร่งความเร็วที่ยิ่งใหญ่ และต้องการพลังงานที่มากขึ้น ในทางปฏิบัติ เราเลือกเซอร์โวมอเตอร์ 2000W ที่มาพร้อมกับตัวลดเกียร์ดาวเคราะห์ที่มีความแม่นยำสูง แกน A คือแกนหมุน
4. ระบบขับเคลื่อนเซอร์โว
เครื่องจัดการซ้อนโดยใช้เซอร์โวมอเตอร์พร้อมฟังก์ชั่นดิจิตอล เพลามอเตอร์แต่ละตัวมีเซอร์โวมอเตอร์และตัวลด เซอร์โวมอเตอร์สี่ตัวและตัวลดสี่ตัว รวมถึงมอเตอร์แนวตั้งพร้อมเซอร์โวมอเตอร์ล็อค
5. ที่จับรถยก
การวางซ้อนด้วยการออกแบบพิเศษของด้ามจับแบบนิวแมติก ความดันที่ปรับได้ พร้อมวาล์วบัฟเฟอร์แรงดัน เพื่อให้การจับที่มีกลไกการเหนี่ยวนำสามารถรับรู้วัตถุได้โดยอัตโนมัติ และแจ้งให้ศูนย์ควบคุมทราบถึงการจับวัตถุ
6 ระบบควบคุม
ระบบควบคุมประกอบด้วย PLC ขนาดใหญ่และหน้าจอสัมผัส ระบบมีความสามารถในการตั้งโปรแกรมที่มีประสิทธิภาพ ด้วยการจัดวางบนพาเลทหลายรุ่น ระบบสามารถตั้งค่าโปรแกรมสิ่งประดิษฐ์ต่างๆ ไว้ล่วงหน้าได้ และสามารถดำเนินการแทนโปรแกรมที่เกี่ยวข้องได้บนหน้าจอสัมผัส
7 อุปกรณ์ความปลอดภัย
เครื่องมีฟังก์ชั่นแจ้งข้อผิดพลาดและสัญญาณเตือน และทุกข้อผิดพลาดสามารถสะท้อนตำแหน่งเฉพาะได้อย่างแม่นยำ ง่ายและรวดเร็วในการกำจัดข้อผิดพลาด ส่วนใหญ่รวมถึง: ฟังก์ชั่นป้องกันการชนกันของหุ่นยนต์ การติดตั้งชิ้นงานในการตรวจจับตำแหน่ง การป้องกันความปลอดภัยของหน้าจอแสง
พารามิเตอร์ทางเทคนิค
1. รุ่นเครื่อง: YST-MD1500
2. ความจุซ้อน : 200-500 กล่อง/ชม
3. โครง: SS41 (การรักษาพลาสติกด้วยการฉีดเหล็ก A3) เพลาเหล็กแบริ่ง S45C
4. พลังงาน: AC, 3 เฟส, 380V, 9KW 50HZ
5. ปริมาณการใช้อากาศ: 500NL / MIN (การใช้อากาศ: 5-6kg / cm2)
6. ขนาดอุปกรณ์: (L) 3500 มม. (W) 2250 มม. (H) 2800 มม. (ขึ้นอยู่กับการออกแบบเค้าโครงจริง)
7. น้ำหนักอุปกรณ์ : 1,500 กก


การกำหนดค่าข้อได้เปรียบหลัก
1. เซอร์โวมอเตอร์ยี่ห้อ Yaskawa
2. ตัวลดความเร็วของแบรนด์ไต้หวัน
3. บมจ. มิตซูบิชิ (ญี่ปุ่น)
4. คอนแทคเตอร์และสวิตช์จะต้องใช้ในชไนเดอร์
5. โฟโตอิเล็กทริคเซนเซอร์ของออมรอน
6. การดำเนินการแสดงการควบคุมอินเทอร์เฟซและสถานะการเตือนและฟังก์ชั่นการเตือน
7. ตัวแปลงความถี่ยี่ห้อ Yaskawa
8. โครงและแผงด้านข้างทำจากเหล็กคาร์บอน
9. องค์ประกอบ AirTac นิวแมติกของไต้หวัน
10. Sucker ยี่ห้อ PIAB ของอิตาลี









